Welcome to segment 1 of 4 examining the use of aerial robotic systems for contact-based UT measurements. In this segment, we examine this new pioneering aerial robotic measurement technology and how it operates. In the next segment we consider the benefits and constraints of these systems, in segment 3 “it’s all about data”, reporting, and more, and in segment 4 we review how these systems can be used in your organization and what may be in store for the future of this exciting technology.
Introduction
For corrosion or other engineers to take Ultrasonic Thickness (UT) measurements at height they may need to utilize a lift, scaffolding, ladders, inspection trucks with elevated baskets, ropework, catwalks, cranes, rigging, or other solutions. While NDT inspection programs can dramatically increase the safety and integrity of assets, access requirements in performing these inspections in elevated areas introduce risk. Working at height is dangerous, due to the possibility of falls, as well as being time-consuming due to access set up. In certain instances, it may also require taking an asset, such as a flare stack, offline so it can be accessed to take measurement readings.

Image 1 - Representative photo of a multiple-echo ultrasonic wall thickness measurement device, a DeFelsko PosiTector UTG-M gage with single-element 5 MHz contact transducer[1]
Current Measurement Collection Methodology
Electronic UT measurement devices have a long history of measuring ferrous substrates. According to a major manufacturer of these devices; “Most coatings on steel and iron are measured this way[2]” providing thickness readings frequently shown on a liquid crystal display (LCD) with a measurement tolerance of ±1% [3].
A typical “Manual” measurement system/process works as follows.
An individual or corrosion engineer is trained and often certified, for “working at height”.
Access may include finding a ladder, erecting scaffolding, securing the use of a lift or crane, etc. Access could also utilize components built into the structure such as ladders, handholds, etc.
The worker then obtains access to the area of a structure wearing the appropriate safety equipment including fall protection and restraints and carrying a handheld electronic UT measurement device. Often this requires at least two people, as climbers need to use a “buddy system”.
Once the worker is in the correct location, they utilize the handheld electronic UT measurement device to touch the probe tip to the surface and take measurements.
The worker then safely “moves” to the next location(s) and repeats the process.
The worker then safely “comes down” from the location(s) at height and creates a report of their findings.

Image 2 - Current state of the art for obtaining Contact Based NDT Measurements [4]
New “Aerial Robotic” Measurement Collection Methodology
Apellix has developed the Opus X4 UT computer-controlled heavy-lift multi-rotor drone outfitted with various sensors and functions to allow precisely controlled flight close to structures. Manual control of such systems is unable to accomplish the precise flying and maneuvers required; thus software-controlled flight is crucial. The Apellix aerial robotic systems utilize existing electronics and digital probes to perform UT measurements with the device onboard the aircraft streaming data (not just what would be displayed on the LED view screen) to the onboard computer. This innovation was named a 2017 Corrosion Innovation of the year by the National Association of Corrosion Engineers (NACE) [5].

Image 3 - Apellix Opus X4 UT Measurement System taking NDT (UT) measurements on an in-service aboveground storage tank and an in-service active Flare Stack [6]
The Apellix Opus X4 UT aerial robotics system works as follows.
The tethered (for data and power) or untethered (battery power and wireless data) aerial robotic system is located close to the structure where UT measurements are to be taken.
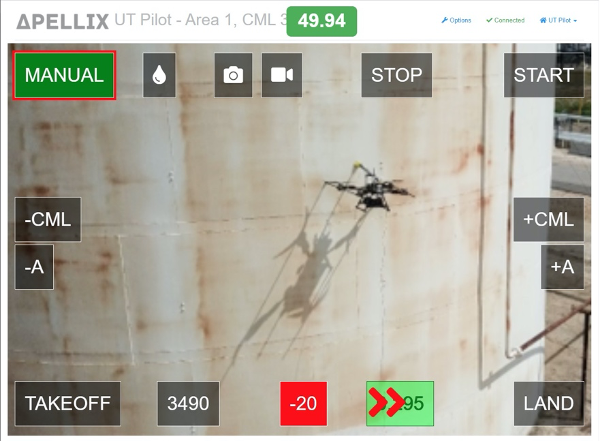
The corrosion engineer using a computer tablet (such as an iPad) opens the software interface to begin the test and enters the job information (operator, job name, upper and lower limits for measurements, etc.).
The pilot engages the aerial robotic systems software and the system takes off vertically to approximately 2 meters in height, hovers, and completes self-checks.
The pilot then uses a standard handheld radio frequency transmitter [7] to manually fly the system close to where the UT measurement is to be taken. i.e. the “gate” or “window”.
Once the aerial robotic system is within the “gate” (i.e. ~2 meters from the target part of the structure) the pilot chooses “Start” on the software interface.
The system then operates under full computer control (no manual input). It flys in (whilst dispensing couplant gel onto the probe), touches the surface, and takes a UT measurement reading, typically taking 1 to 4 seconds, with multiple data points. The aircraft then backs away, the pilot repositions the system at the next location, and repeats the process for additional measurements at different corrosion monitoring locations (CML) or areas/zones
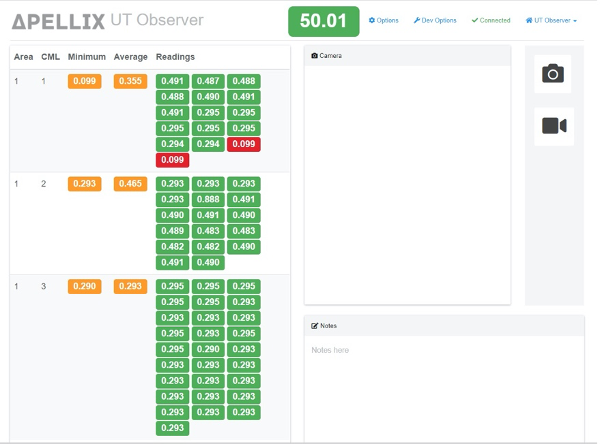
The corrosion engineer, ships surveyor, etc. sees the data on their computer tablet in real-time.